02 — Photos & Media
See the work
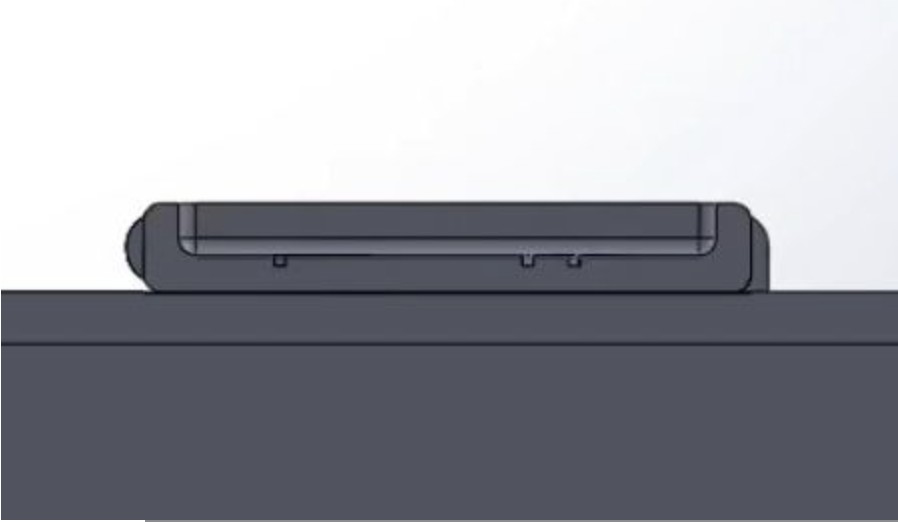
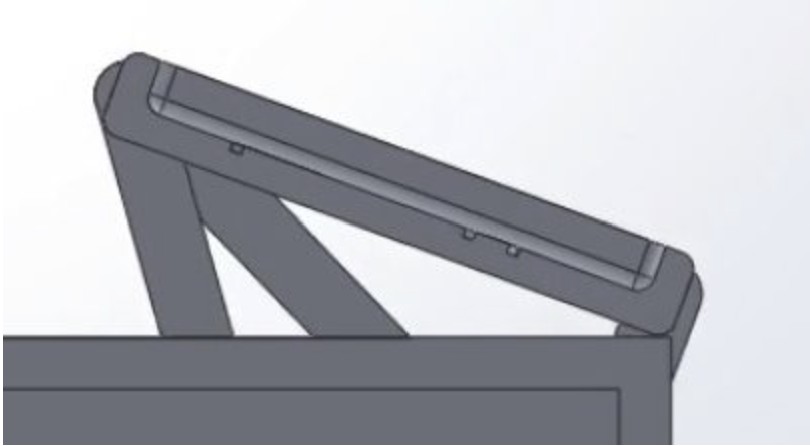
Gripper assembled — open position
Replace with <img> or <video>
Replace with <img> or <video>
Replace placeholders with your photos
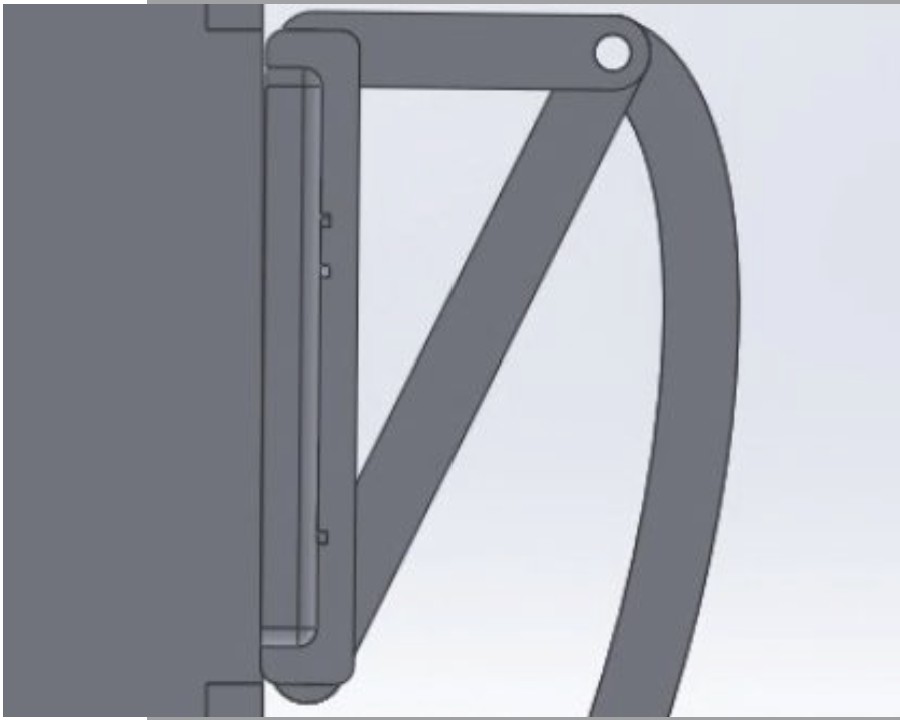
SolidWorks linkage model
3D printing in progress
Gripper holding an object
<
Mechanism Section motion test
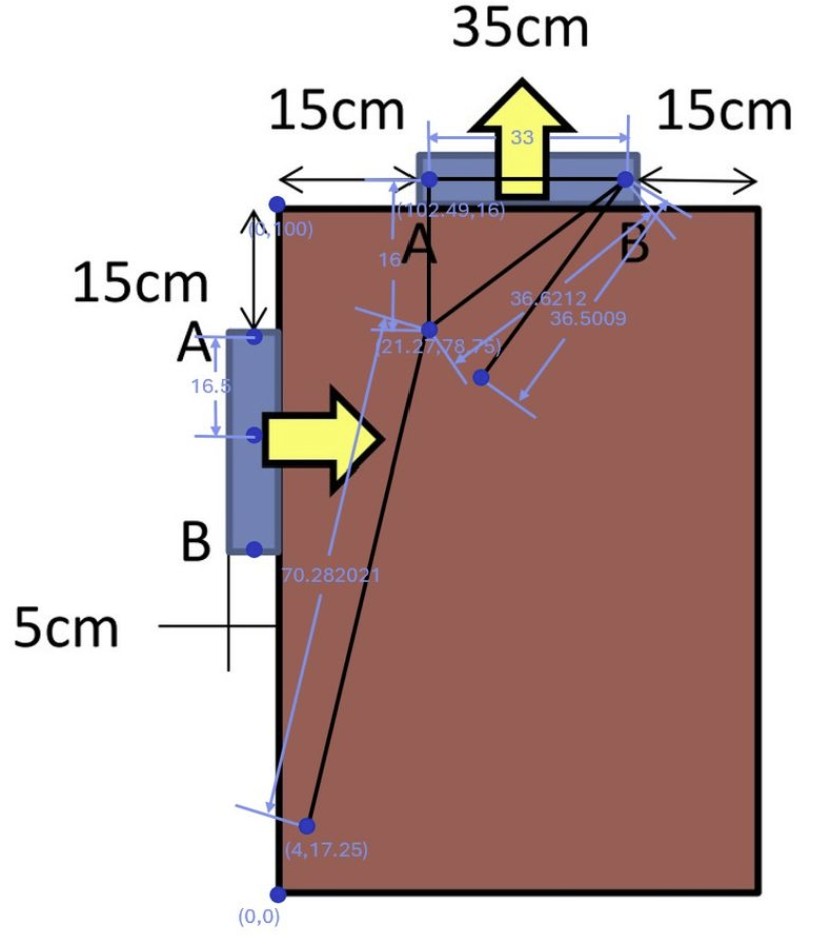
Mechanism Measurements