See the work
 -->
-->
 -->
-->
 -->
-->
 -->
-->
Watch the dispenser in action
How we got there
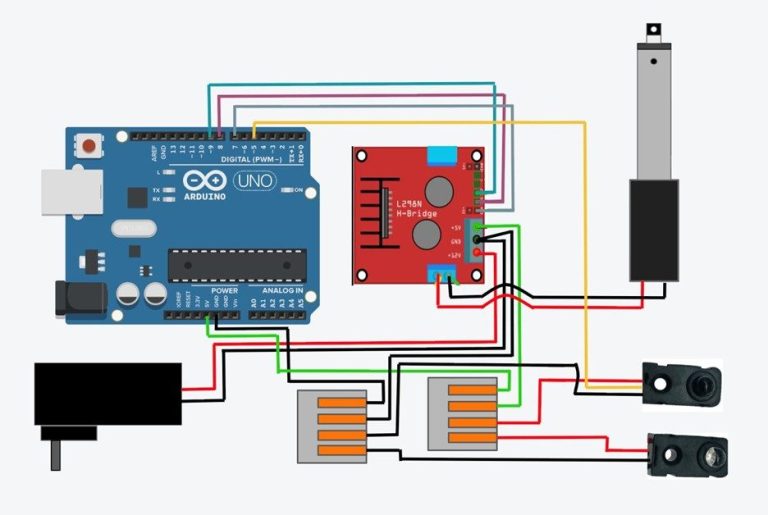
Wiring Diagram in TinkerCad
Modeled the full wiring setup in TinkerCad before any physical assembly. This caught potential short circuits and helped communicate the design to teammates.
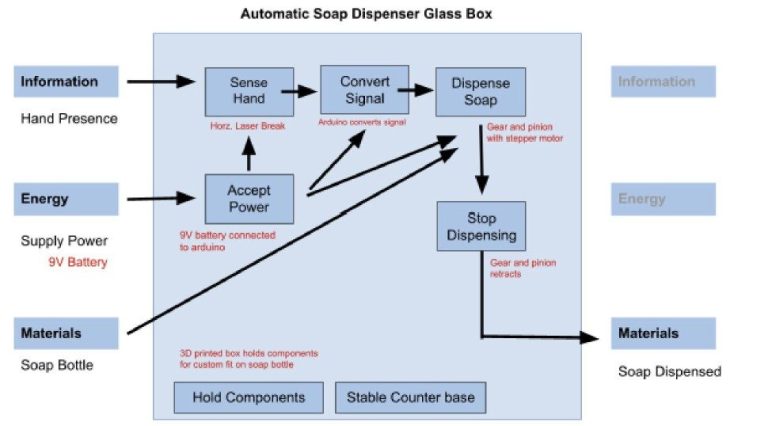
Glass Box & Code Flowchart
Created a glass box diagram and code flow chart to fully map system logic before writing a single line of code or building a prototype.
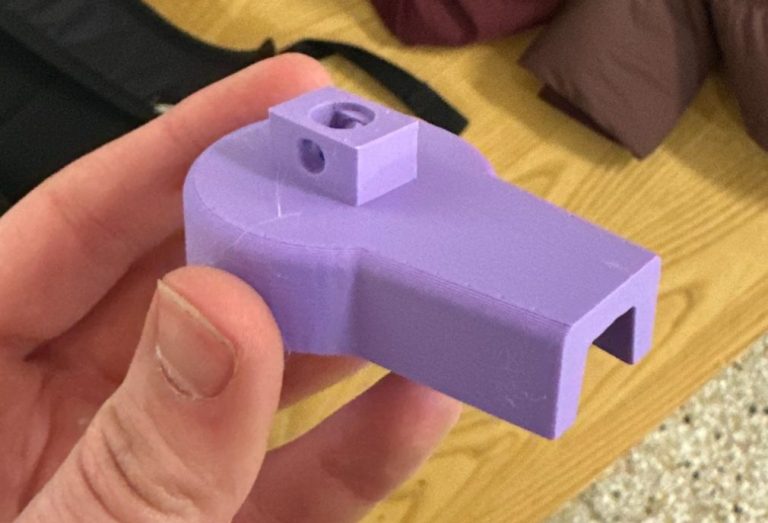
Dimension Survey of GOJO Bottle
Precisely measured the GOJO soap bottle dimensions with calipers to inform housing design and ensure correct actuator travel distance.
Prototype Build & Test
Built first working prototype, identified flaws — actuator contact, sensor positioning, weight distribution — and iterated on each issue systematically.
Final Integration
Assembled all subsystems, ran repeated dispensing trials, verified consistent operation, and documented results for the final report.
What we achieved
Successfully built an automatic GOJO soap dispenser that consistently detected hand presence and dispensed soap with reliable timing.
Stable across repeated trials — no mechanical jams or false triggers during testing, confirming robust sensor placement and actuator tuning.
Identified actuator weakening after many cycles as a key improvement area for a production version of the design.
Clear path to improvement — enclosure compactness, sensor calibration, and actuator durability identified as next iteration priorities.